本文共 1778 字,大约阅读时间需要 5 分钟。
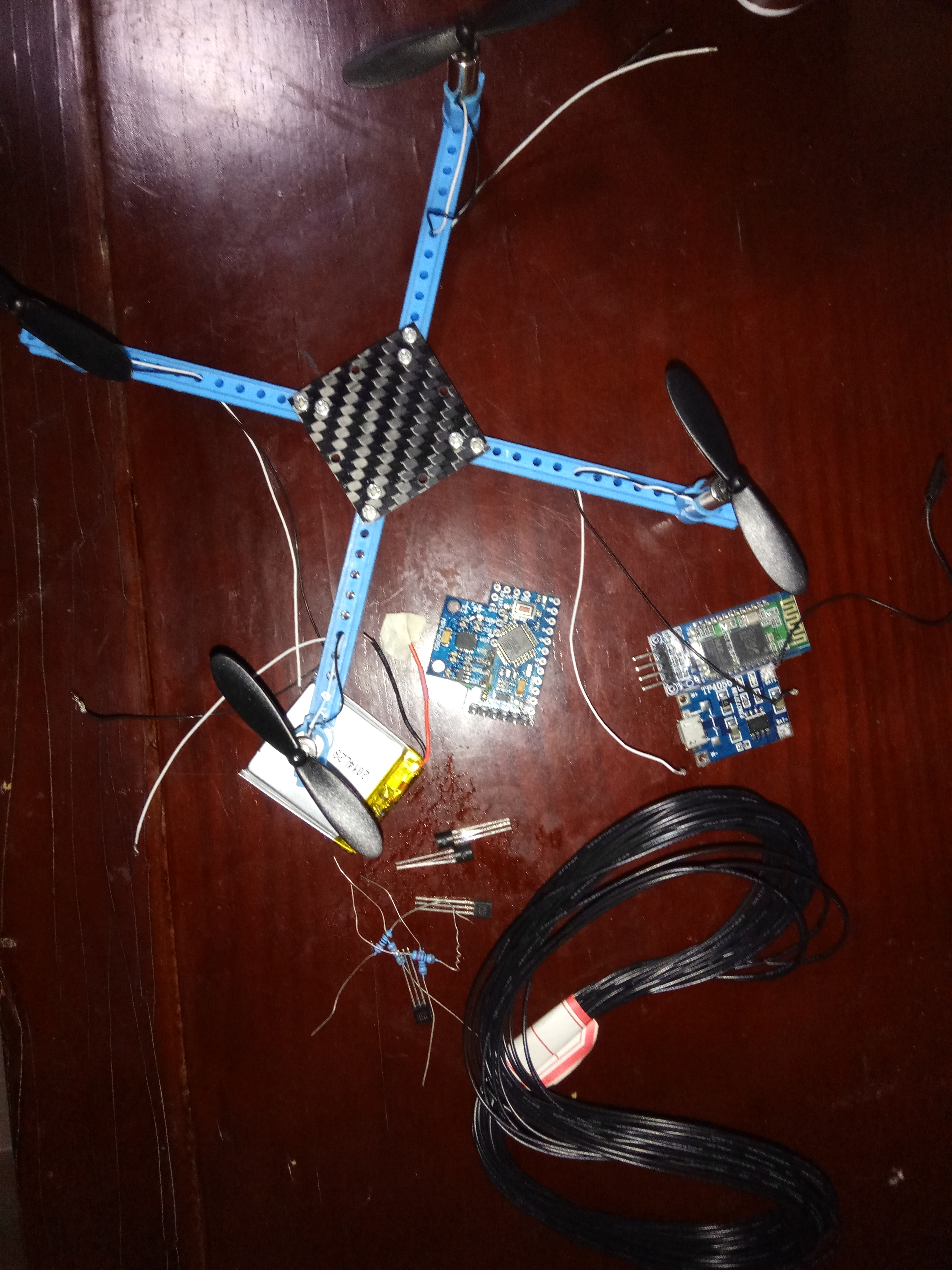
这次给大家分享个基于MultiWii飞控的安卓手机(平板)蓝牙控制的微型四轴飞行器
首先给大家分享一些我收集的一些参考资料
一些开源迷你多轴无人机官网
MultiWii资料
本人在线收集的一些问题与制作教程参考
教程部分
1.材料准备
| 数量 | |
|---|---|
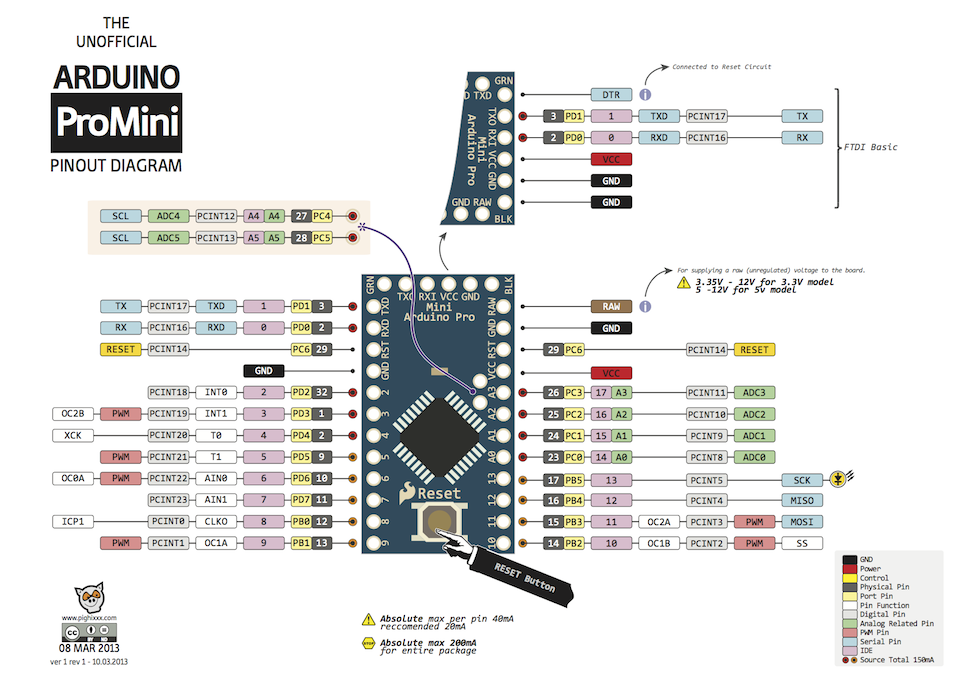
| Arduino Pro mini模块(ATMEGA328P5V 16MHz) | 1 |
| GY 521三轴加速度计模块 | 1 |
| HC06蓝牙模块(从机) | 1 |
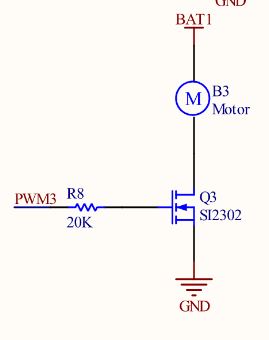
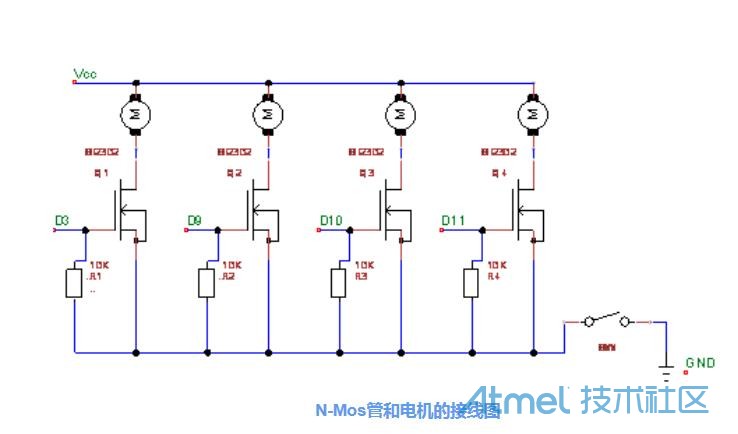
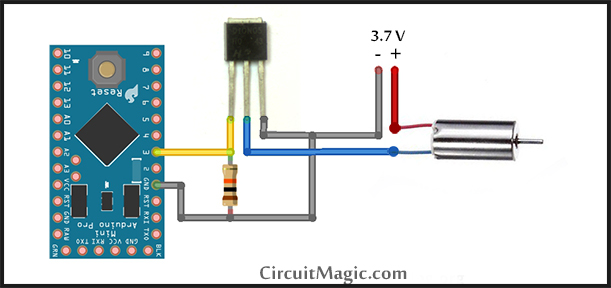
| SI 2302 (N-MOS管) | 1 |
| 10kΩ电阻(贴片) | 1 |
| 720(或716)空心杯 | 1 |
| 55mm(或44mm)正反桨 | 4 |
| ≥350mAh航模锂电 | 1 |
| 小型波动开关 | 1 |
| 洞洞板 | 1 |
| 导线 | n |
| USB-TTL刷机线 | 1 |
| 机架 | 1 |
| 锂离子电池充电模块 | 1 |
2.软件环境
Windows操作系统
手机Andriod 4.0以上--如果你是Arduino小白可以先了解Arduino
Arduino IDE 下载 或去下载最新版 下载或去下载最新版再或下载我之前下好的源文件:1.
2. 3. 4.根据需求可以选下飞控调试工具当然这工具是需要java运行环境的。
最新版本的JAVA可以上下载,点击主页中间的“免费JAVA下载”,会直接跳转到适应你电脑操作系统的JAVA下载页面,下载并安装安卓遥控软件
(提取密码 :y8nb)
买来的蓝牙模块可能需要修改频率后才能连接安卓手机(蓝牙的波特率改为115200)
蓝牙模块HC06的资料与调试软件, 如果你是用原始2.2程序你还需要修改程序config.h下,可以Ctrl+f查找,#define RCSERIAL 删除前面的"//"软件教程可以参考《》我就不多写了。(备份地址[用开源飞控套件做一架Mini四轴飞行器](demo1/download/mmmm/用开源飞控套件做一架Mini四轴飞行器 - 创酷网 - 科技DIY分享平台.html))
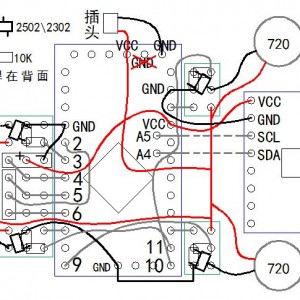
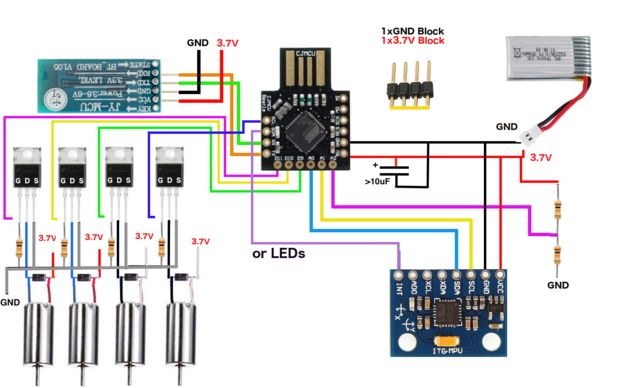
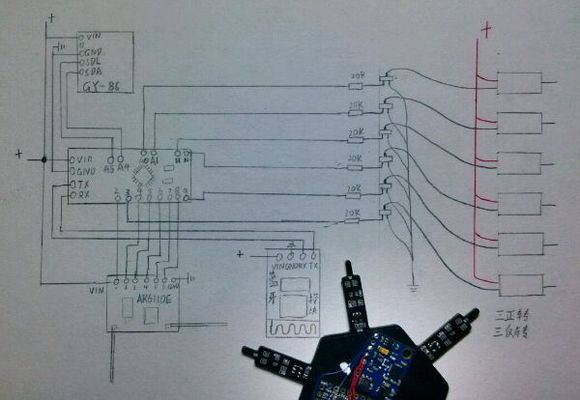
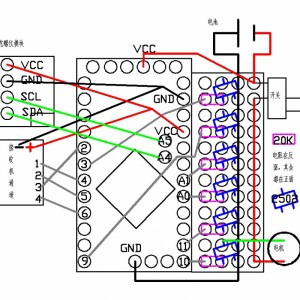
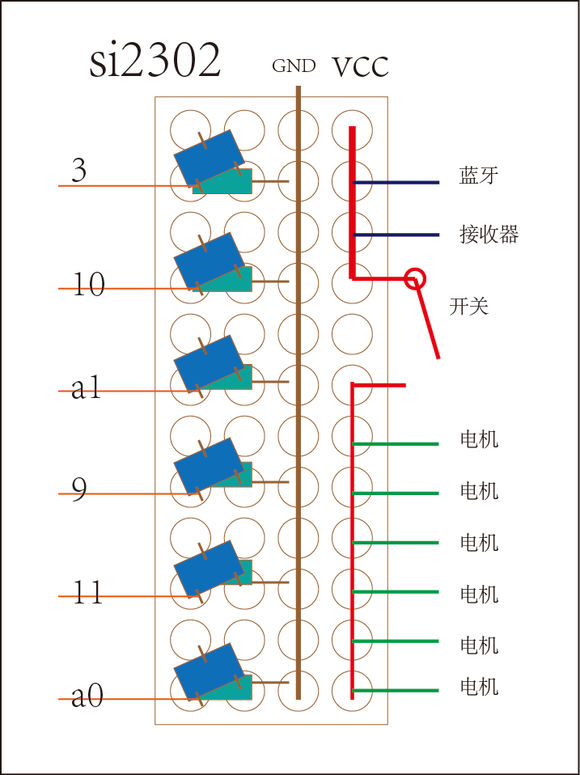
3.电路参考图
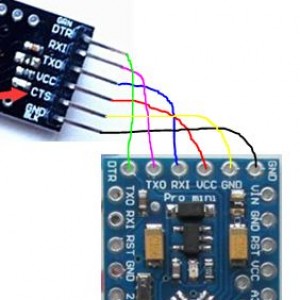
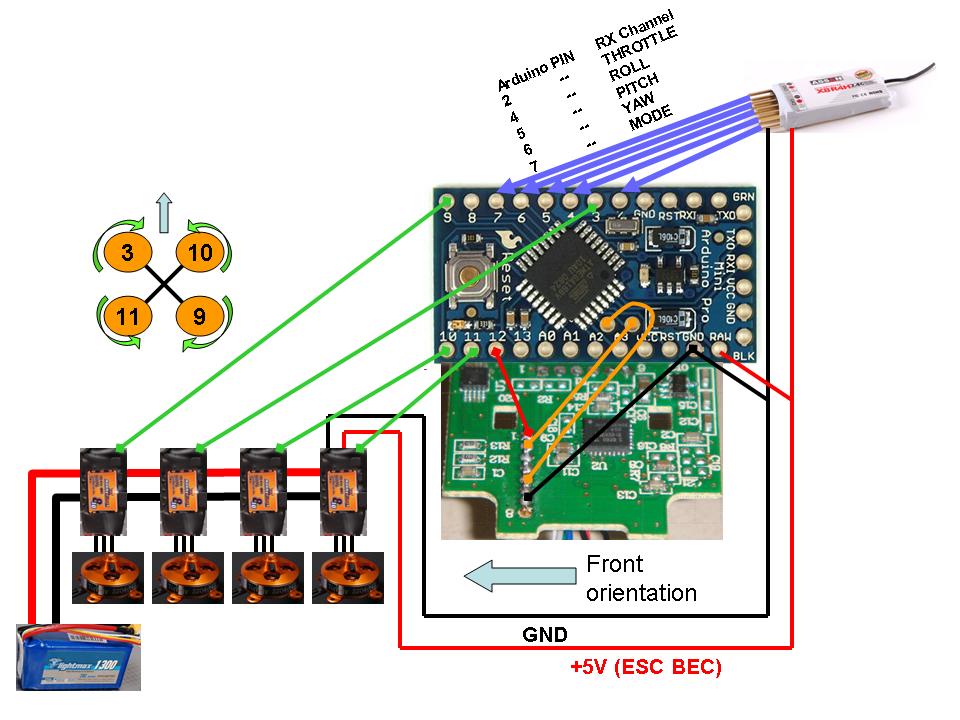
4.连接调试
注意下载器可能会占用蓝牙的连接引脚,我的做法是先用下载器连接Arduino调试,成功后再连接蓝牙
你可以选择先用multiwiiconf调试查看GY 521是否连接成功
成功后拔出下载器连接上蓝牙模块, 通电后尝试用手机连接飞控。手机运行Multiwii EZ-GUI,第一次使用前需要进行设置,向左滑动页面,至“设置”页,点击“设置”按钮,根据情况调整参数,第一页的蓝牙设置需要选择四轴飞行器的蓝牙名称,其他设置都是默认值,完成全部设置后会重新启动应用程序,点击“确认”即可。
手机提示连接成功后,蓝牙灯长亮,进入仪表盘界面,转动四轴飞控看看仪表盘是否跟随变化。如果有变化说明真正连接成功。(如果没成功看看蓝牙的引脚是否连接正确,以及config.h配置是否正确)
然后界面向右滑动,在第三页有设置界面,在下面有高级设置,点进去,有Model control New,Model control Old,AUX控制,这里我们选第一个,也就是Model control new,点进去可以看到一个黑色大盘子和上边界,右边界蓝色拖动条,在最上面右边有个设置

其实这里可以自由设置的(YAW 方向,THRO油门,ROLL升降,PITCH副翼)。然后,激动人心的时刻到了,如果你蓝牙已经连接,飞控正常工作的话就可以解锁了,方法是红色按钮拖到最底,再向右,具体就是油门最小,方向最大,这时可以看到arduino 板子上一个绿灯亮了,恭喜你,解锁成功,向上推动油门,电机就会开始转了。如果需要上锁的话,同样,红色按钮最底,向左,具体是油门最小,方向最小,板子上的绿灯灭,上锁成功。
总结
其实,大多数情况下还是用遥控器的多,蓝牙绝对是坑,常常会出现断线的情况。到最后由于我弄掉了一个MOS管用三极管来代替了,飞机能飞但可能是用三极管的原因或是飞机太重了,最高离地也就1-2cm,而且方向很偏。但通过自己从查找资料,购买材料,写入程序,发现问题,解决问题的一系列过程中学到了一些东西,这让我觉得之前的折腾都是值得的!!!
转载地址:http://dlmhl.baihongyu.com/